基于遗传算法的移动机器人动态避障路径规划方法.pdf
时间:11-11 09:46
查看:1914次
下载:162次
简介:
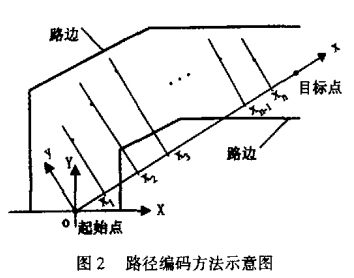
提出了一种基于遗传算法的简单、有效的移动机器人实时动态避障路径规划方法.为利用遗传算法实时、稳定地进行动态路径规划.本文将复杂的二维路径编码问题简化为一维编码问题,并把路边约束、动态避障要求和最短路径要求融合成一个简单的适度函数.仿真实验表明.本文提出的动态路径规划方法可实时、稳定地产生移动机器人运动的最佳局部规划路径,且具有良好的动态避障性能该方法也可用于智能车辆的自动导航