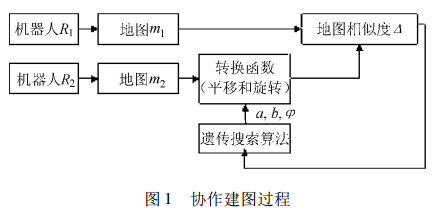
针对复杂环境以及无法获知机器人位置信息的情况, 提出一种多移动机器人协作构建地图的新方法 。 该方法采用独立探索 、 集中建图的探索策略, 对环境建立局部栅格地图并予以融合 。 在地图融合过程中 , 无需已知机器人的相对位置信息, 而是以栅格地图相似度为度量标准, 利用距离变换和改进的遗传算法高效 、 快速地搜索各局部地图之间的最大重叠部分, 进而予以融合 。 此外, 考虑到局部地图无重叠部分的情况, 引入判断函数对融合结果予以度量 。 实验结果验证了该方法在复杂环境下的可行性和有效性 。
传智播客-IOS开发零基础入门教程之04 objective-c面向对象10
allegro技巧-ALLEGRO软件中模块复用的方法及技巧分析
传智播客-IOS开发零基础入门教程之04 objective-c面向对象06
altium designer技巧-快速调整丝印的方法
C3程序猿C语言入门视频教程-21.2.测试大小端模式
Linux专题视频\Linux服务器架设\架设NFS文件服务器的方法
12. java视频教程_Java基础_方法的重载
28_尚学堂_白鹤翔Javascript_设计模式【二】
x