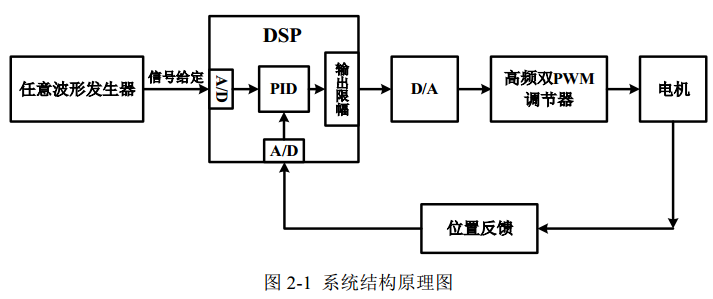
本文提出的基于 DSP 的电动舵机控制系统是由任意波形信号发生器、 DSP 处理器、 D/A 转换模块、高频双 PWM 调制器、直流电机及减速机构、位置反馈 单元等模块构成的闭环位置伺服系统。
西安交通大学电机学66(阎治安主讲)
西安交通大学电机学71(阎治安主讲)
西安交通大学电机学15(阎治安主讲)
王健带你征服汽车CAN总线—第一讲:CAN总线原理
王健带你征服汽车CAN总线—第三讲:怎样用程序控制CAN总线
王健带你征服汽车CAN总线—第二讲:CAN总线控制器
2-5 DSP元件电路符号的创建
【力天电子】01 第一讲 初识LT-DSP2812开发板--手把手教你学DSP之提高篇
x