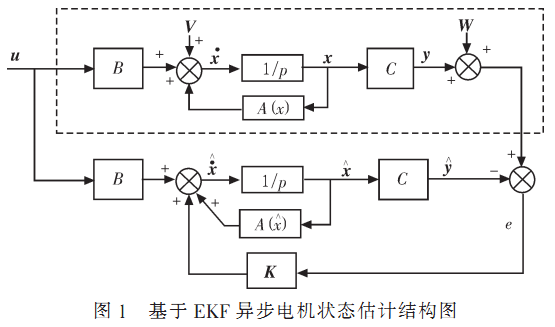
为了提高直接转矩控制(DTC)系统定子磁链估计精度,降低电流、电压测量的随机误差,提出了一种基于扩展卡尔曼滤波(EKF)实现异步电机转子位置和速度估计的方法。扩展卡尔曼滤波器是建立在基于旋转坐标系下由定子电流、电压、转子转速和其它电机参量所构成的电机模型上,将定子电流、定子磁链、转速和转子角位置作为状态变量,定子电压为输入变量,定子电流为输出变量,通过对磁链和转速的闭环控制提高定子磁链的估计精度,实现了异步电机的无速度传感器直接转矩控制策略,仿真结果验证了该方法的可行性,提高了直接转矩的控制性能。