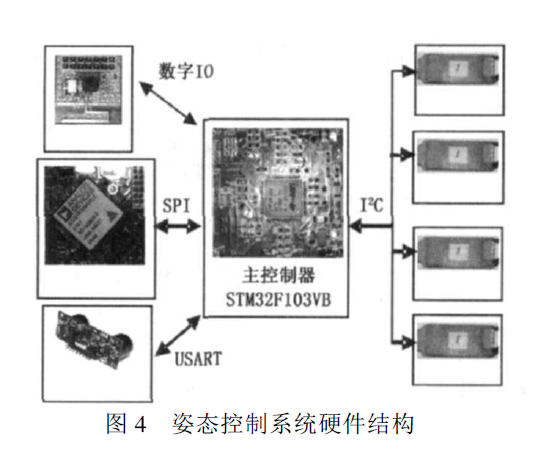
四轴飞行器具有不稳定、非线性、强耦合等特性, 姿态控制是四轴飞行器飞行控制系统的核心; 通过分析四轴飞行器的飞行原理, 根据其数学模型和系统的功能要求, 设计了四轴飞行器的姿态控制系统; 该系统采用stm32 系列32 位处理器作为主控制器, 使用ADIS16355 惯性测量单元等传感器用于姿态信息检测; 系统基于模块化设计的思想, 各传感器都使用数字接口进行数据交换, 结构简单; 使用PID 控制算法进行姿态角的闭环控制, 实验结果表明, 飞行器能较好的稳定在实验平台上, 系统满足四轴飞行器室内飞行姿态控制的要求。