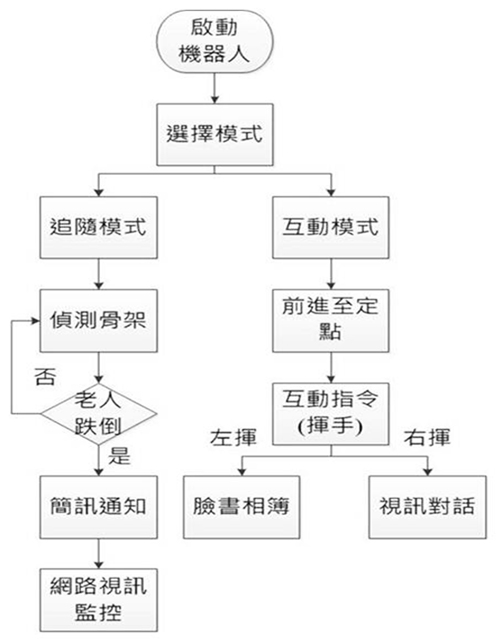
该系统利用主系统晶片将Kinect 所感测的骨架追踪、手势辨识及网路摄影的视讯通话等感测后存取数值,再利用串列传输(USART)传送数值于主系统晶片,并做出距离等识别模式,进行跟随老人、控制马达与老人互动。
机器人动作流程图如下:
手机 OTG USB 转串口线 连接单片机 Android Serial MCU
Coocox 开发 STM32F0 Discovery—《MCU STM32在线培训》
STM32 PMSM FOC SDK V3.2 培训讲座十—《MCU STM32在线培训》
STM32 PMSM FOC SDK V3.2 培训讲座十一《MCU STM32在线培训》
STM32 PMSM FOC SDK V3.2 培训讲座七—《MCU STM32在线培训》
欢迎进入ST MCU的世界 — 《MCU STM32在线培训》
coocox简介—专辑:《MCU STM32在线培训》
传感器与信号调理(山东大学)—第27讲
Cocktail
x