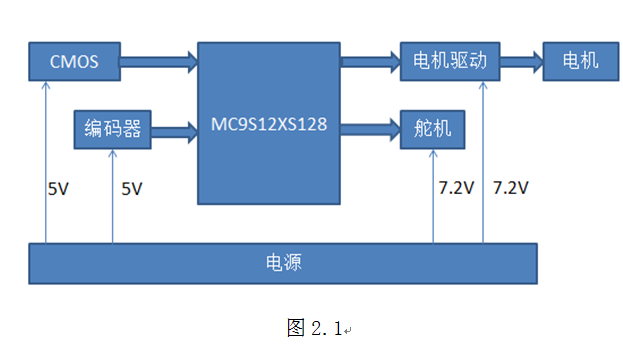
本文介绍的是以MC9S12XS128为核心的智能车系统。该系统采用大赛组委统一指定的由东莞市博思电子数码科技有限公司提供的A型车模,以Freescale半导体公司生产的16位MC9S12XS128为核心控制器,采用OV7620数字摄像头采集道路信息,在CodeWarrior IDE开发环境中进行软件开发。整个系统涉及车模机械结构调整、传感器电路及电机驱动电路等辅助电路的设计、信号采集与处理、控制算法和策略优化等多个方面。为了提高智能车的行驶速度和系统稳定性与可靠性,设计了不同方案进行各项性能对比,结合PC平台及其它实验仪器进行了大量测试,并选出其中优秀方案反复进行了赛道测试,最后经过总结优化,确定了现有系统结构和控制方案。本系统通过数字摄像头进行赛道检测,识别赛道边缘黑线并拟合出赛道中心线,对舵机进行反馈控制,并通过速度传感器获取即时速度,运用PID优化算法实现速度控制。