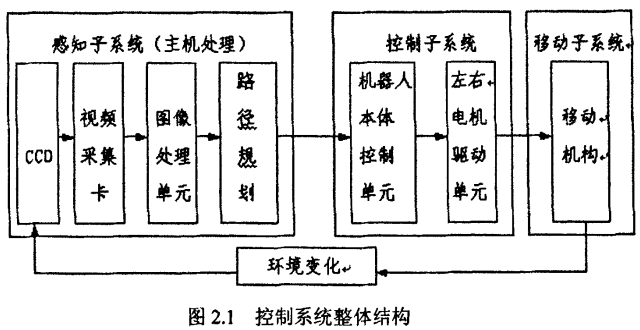
移动机器人运动控制结构决定了它的运动能力。本文采用主从式控制结构,
即由主机完成复杂运算并将处理后的数据传递给从机,由从机完成小车本体的控制,从机通过数控插补技术来实现机器人小车两驱动轮的联动;由运动函数构成的运动控制源程序在PC机编写,经编译生成相应的目标代码并通过串口发送到从机,从机的功能一是接收来自主机的数据和命令,二是根据主机发送的数据执行插补运算并驱动电机。从机是以STC89LE52为核心的运动控制器,利用STC89LE52芯片的控制功能,实现了移动机器人两驱动电机的控制。由从机构成的运动控制器,成本低,功能强,使用方便,而具有十分广阔的应用前景。