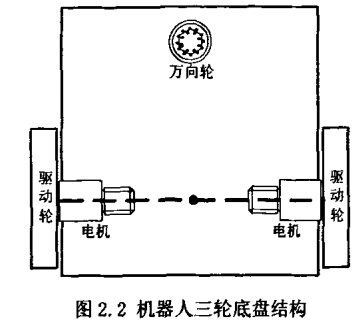
随着移动机器人技术研究的不断深入,机器人涉足的领域越来越广,需要完成的任务越来越精确复杂,运动的实时性和可靠性要求也越来越高。为适应这一发展,目前机器人的设计多采用慎思/反应混合范式。本文重点对移动机器人底层运动控制系统进行了设计,并将其用于基于慎思/反应混合范式的高尔夫球童机器人。
Arduino-2WD轻量移动机器人旋转机动性测试
Arduino-2WD轻量型移动机器人超声波旋转侦测演示
Arduino-4WD移动机器人寻线与避障功能演示
Arduino-2WD轻量型移动机器人避障功能演示
Arduino-2WD轻量型移动机器人追光功能演示
单片机音乐喷泉设计/音乐频谱彩灯设计/DIY电子制作
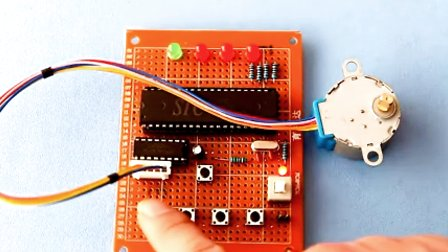
高清毕设课设 单片机步进电机控制系统 LED
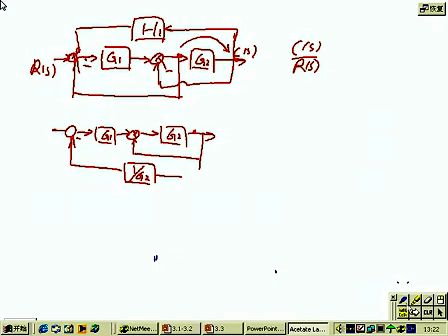
吉大自动控制原理04 控制系统的时域分析法
x