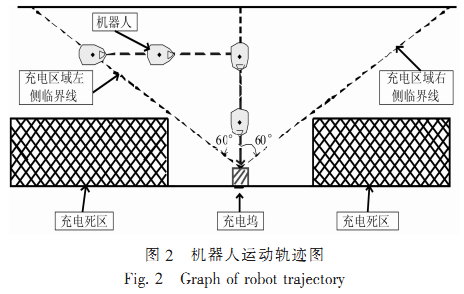
为了满足机器人长期自主工作的电源要求,对室外环境下工作的移动机器人自主充电问题进行了研究。设计了具有2个自由度对接功能的充电装置,提出了一种简单有效的对接策略,此外具有错位对接纠错功能。通过自主充电实验验证了充电装置的实用性和对接策略的可行性。
Arduino-2WD轻量移动机器人旋转机动性测试
Arduino-2WD轻量型移动机器人超声波旋转侦测演示
Arduino-4WD移动机器人寻线与避障功能演示
Arduino-2WD轻量型移动机器人避障功能演示
Arduino-2WD轻量型移动机器人追光功能演示
开关电源电路设计的介绍
电子设计大赛(开关稳压电源)
单片机 避障 小车 电子竞赛
x