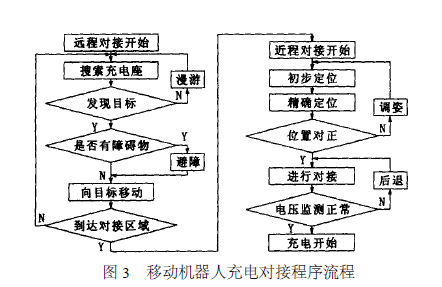
介绍了移动机器人自动充电的2 种方式,接触式充电和非接触式感应充电,分析了移动机器人自动充电的相关技术。
Arduino-2WD轻量移动机器人旋转机动性测试
Arduino-2WD轻量型移动机器人超声波旋转侦测演示
Arduino-4WD移动机器人寻线与避障功能演示
Arduino-2WD轻量型移动机器人避障功能演示
Arduino-2WD轻量型移动机器人追光功能演示
CAN总线设计/基于51单片机CAN总线通信设计
基于51单片机手机充电器
基于51单片机数控电源正负15v 10V可调
Cocktail
x