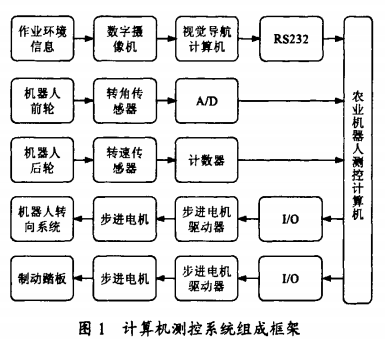
对农业自主行走机器人的单目视觉导航技术展开了研究,包括行走路径的提取方法和机器人的自定位方法。对复杂农田场景和道路场景进行了描述和合理的假设,通过对图像信息的处理和理解,采用改进的Hough变换的方法提取出导航路径,并根据导航路径信息对农业自主行走机器人的自定位技术进行了研究,最终求得机器人相对于导航路径的横向偏离和角度偏差.实验结果表明,该方法能够满足农业机器人自主行走的要求.
单片机毕设调试指导视频9、继电器调试与外接负载方法
基于FPGA的交通灯设计(非单片机)-红外遥控通行状态
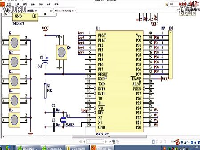
单片机毕设调试指导视频7、从protel中粘贴清晰图
单片机毕设调试指导视频8、芯片引脚说明
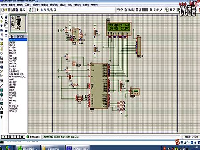
单片机毕设调试指导视频10、仿真软件怎么用(入门)
单片机毕设调试指导视频6、按键轻触按键的调试方法
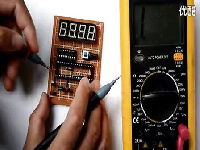
单片机毕设调试指导视频4、数码管电路调试方法
单片机毕设调试指导视频2、LCD1602液晶的调试方法
x