基于超声波测距的自主移动机器人路径规划.doc
时间:11-11 11:48
查看:1345次
下载:162次
简介:
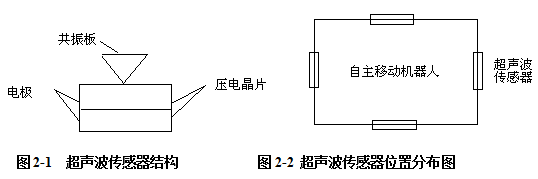
本文对基于超声波测距的自主移动机器人路径规划问题进行了较为深入的探讨和分析。首先。对自主移动机器人的发展状况,以及移动机器人导航技术和路径规划技术的国内外发展现状进行了综述。然后介绍了超声波测距原理,讨论了超声波测距系统应用于导航技术的优势。重点探讨了基于超声波测距的自主移动机器人路径规划技术,采用栅格法进行环境建模,运用了一种称作沿边走的算法进行了路径规划。最后分析了现有方案的优缺点,展望了机器人路径规划技术的未来发展趋势和研究方向。