基于MEMS惯性传感器的微型姿态测量系统(英文)
时间:11-12 15:40
查看:1972次
下载:163次
简介:
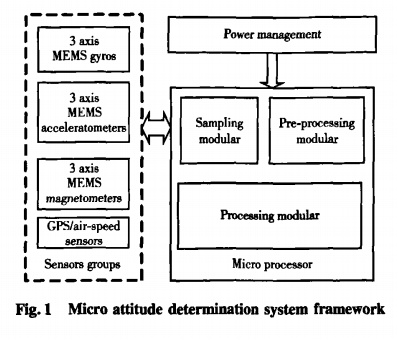
提出了一种基于低成本MEMS惯性传感器的微型姿态测量系统,包括MEMS速率陀螺、MEMS磁强计、单轴MEMS加速度传感器.重点研究了基于扩展Kalman滤波(EKF)的姿态估计创新算法,通过速率陀螺更新误差状态四元数计算姿态角,并通过飞行方向的加速度传感器和三轴磁强计来补偿陀螺漂移和姿态角误差.利用扩展卡尔曼滤波方程消除瞬时干扰,实现高动态姿态测量.系统的仿真和高动态实验表明,姿态测量动态精度低于50。静态精度低于0.70.