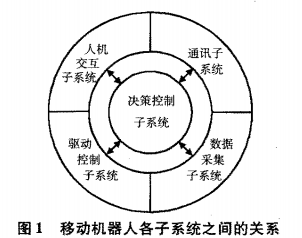
对移动机器人未知、动态环境下路径规划的难题,对移动机器人进行了系统设计,采用动态栅格法对环境建模,在对传统遗传算法进行一定的改进的基础上,个体评价函数采取可行路径适应度函数和可行路径适应度函数分别进行处理,通过算法设计和仿真可知,采用该方法对移动机器人进行动态路径规划时,与任何障碍物不发生碰撞,路径短而且规划曲线平滑,达到了满意的规划效果和收敛速度。
Arduino-2WD轻量移动机器人旋转机动性测试
Arduino-2WD轻量型移动机器人超声波旋转侦测演示
Arduino-4WD移动机器人寻线与避障功能演示
Arduino-2WD轻量型移动机器人避障功能演示
Arduino-2WD轻量型移动机器人追光功能演示
单片机毕设调试指导视频9、继电器调试与外接负载方法
基于FPGA的交通灯设计(非单片机)-红外遥控通行状态
单片机毕设调试指导视频7、从protel中粘贴清晰图
x