基于光电传感器的移动机器人局部定位系统.pdf
时间:11-19 11:20
查看:1721次
下载:162次
简介:
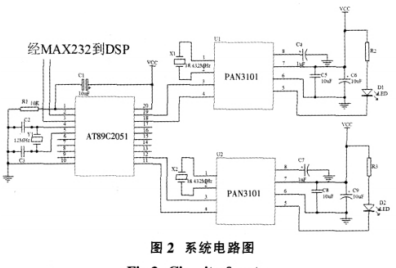
移动机器人的定位 是实现智能控制的基础 , 目前常用的方法有里程计定位和视觉定位等 。 视觉定位常常不能判断物体的准确位置 , 而里程计定位则存在轮子打滑情况 。 因此 , 常遇到因惯性滑动导致定位不准的情况 , 以致对轮转的测量数据不能 作为判断机器人实际运行 情况的依据 。 本文提出一种利用光电传感器实现 局部精确定位的方法 , 它和视觉定位配合可实现 Robocup 足球机器人的大范围精确 定位 。