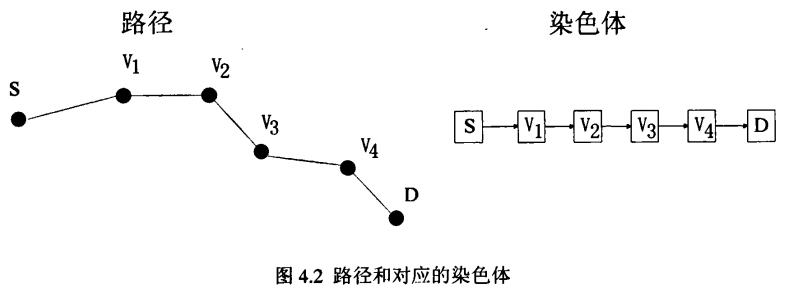
智能移动机器人是指无需人工干预,划是机器人技术研究领域中的核心问题,可以自主完成行驶任务的车辆。路径规它的任务就是在具有障碍物的环境中,寻求一条从已知起点到已知终点的具有最低代价的无碰路径。遗传算法是建立在自然选择和群体遗传学基础上的随机、迭代和进化过程,是路径规划研究领域中的一种十分有效的算法。
Arduino-2WD轻量移动机器人旋转机动性测试
Arduino-2WD轻量型移动机器人超声波旋转侦测演示
Arduino-4WD移动机器人寻线与避障功能演示
Arduino-2WD轻量型移动机器人避障功能演示
Arduino-2WD轻量型移动机器人追光功能演示
单片机毕设调试指导视频9、继电器调试与外接负载方法
基于FPGA的交通灯设计(非单片机)-红外遥控通行状态
单片机毕设调试指导视频7、从protel中粘贴清晰图
x