基于蚁群算法的移动机器人路径规划方法的研究.pdf
时间:11-13 10:46
查看:916次
下载:162次
简介:
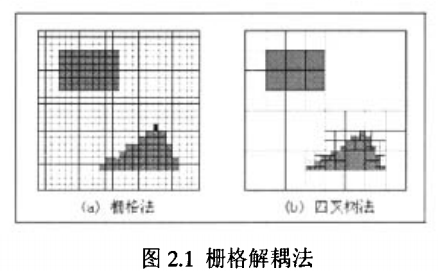
本文首先从理论上研究了移动机器人路径规划的方法、目的及意义。在对各种路径规划方法进行优缺点比较后,选择还处于不断探索阶段的蚁群算法进行路径规划。通过对蚁群算法的深入研究后,在基于栅格的机器人环境中,提出了一种基于蚁群算法求解静态环境下移动机器人路径规划问题的方法。考虑到移动机器人行驶过程中的实际情况,在静态路径规划方法的基础上提出了基于蚁群算法解决动态路径规划的方法。最后,通过对三种静态环境下的仿真实验结果的分析,确定了关键参数的选取,并进行了动态路径规划的仿真。