提出了一种新的最优模糊PID控制器。它由两部分组成,即在线模糊推理机构和带有不完全微分的常规P血控制器在模糊推理机构中,引入了三个可调节因子xp、xi、xd其作用是进一步修改和优化模糊推理的结果,以使控制器对一个给定对象具有最优的控制效果可调节因子的最优值采用rrAE准则及Nelder和Mead提出的柔性多面体最优搜索算法加以确定.这种PID控制器被用来控制由作者设计的智能人工腿中的一个直流电机仿真结果表明该控制器的设计是非常有效的,它可被用于控制各种不同的对象和过程。
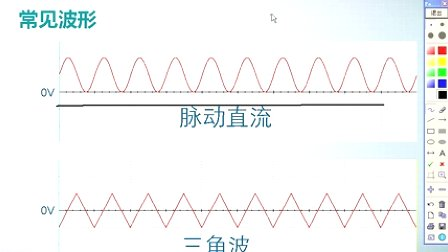
一周搞定系列之模电_第3讲_电容、三极管、场效应管介绍
深入浅出玩转STC15单片机-第03讲_如何学习STC15单片机
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
许友志电子电路基础视频教程01_基本概念
教你使用电烙铁进行锡焊(焊锡教程)
一周搞定系列之模电_第1讲_视频介绍及Multisim下载安装
MATLAB教学视频第11章 Simulink仿真
张飞电子工程师培训视频教程
Cocktail
x