本文主要介绍了智能小车控制系统的软硬件设计及开发过程。整个系统涉及车模机械结构调整、电机驱动和光电传感器的电路设计、路况采集和信号处等多个方面。车模以MC9S12XS128单片机为控制核心,以安装在跟踪舵机之上的激光管作为循迹传感器,采用红外与激光传感器配合的模式检测直线和起跑线,以2.5ms为一周期处理路况信息。
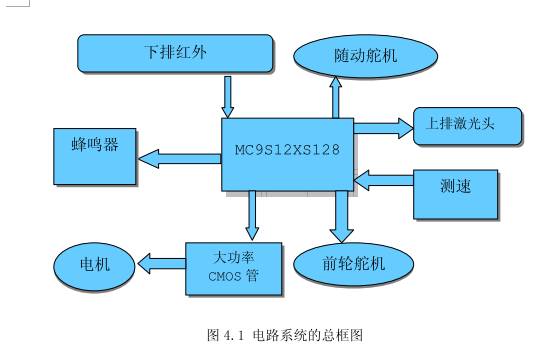
车模系统的简单工作原理是MC9S12XS128单片机收集激光和红外传感器返回来的赛道信息,通过相应运算后,软件判断其有效性,结合控制算法控制随动舵机给出合理舵值,控制前轮舵机转向,单片机再给出合适的PWM波占空比以控制电机转速,速度控制方面采用一个500线增量式光电编码器来实时反馈脉冲,利用单片机的脉冲累加器采集速度。最后主控制芯MC9S12XS128 综合激光的采集的路面信息和编码器采集的速度信息,利用PID算法实现摇头舵机的转角,转向舵机的转角控制及电机的调速。
经实际场地测试,本车模系统可以很好的适应大小“S”弯,“十”字交叉和大回环等不同的赛道类型以及不同类型赛道的不同组合。