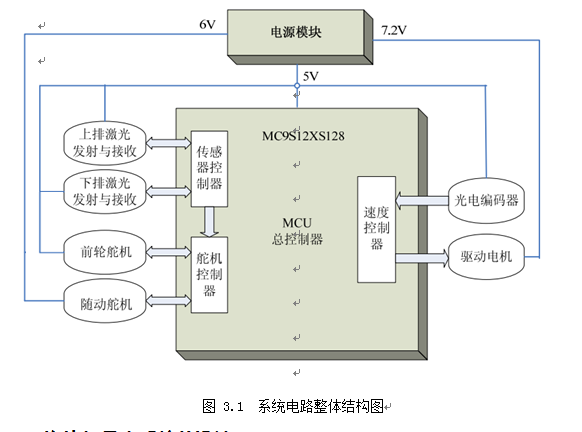
本文以第七届“飞思卡尔”杯全国大学生智能汽车竞赛为背景,着重研究了智能小车控制系统的软、硬件结构及设计开发过程。智能车核心控制器采用飞思卡尔公司的MC9S12XS128MAA高性能16位单片机,单片机开发平台为CodeWarrior IDE 5.0 for XS128,车模采用大赛组委会统一规定的由北京科宇通博科技有限公司生产的B型车模。
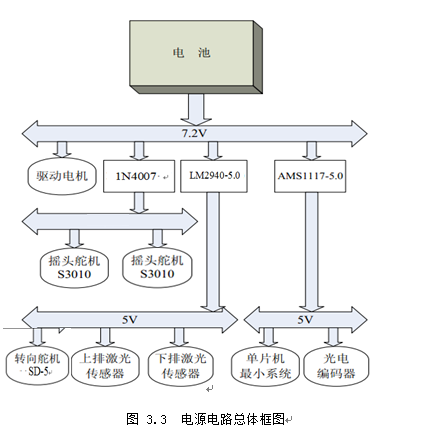
本文介绍了智能小车控制系统的软件和硬件设计及全部开发过程。整个系统包含了对车模机械的改造和设计、硬件电路的设计和试验、程序算法的制定和优化等方面。车模传感器部分由上、下两排激光传感器构成,上排激光传感器为八字双摇头作为主循迹传感器,下排激光传感器为弧形用于辅助上坡和识别起跑线。智能车以MC9S12XS128MAA 作为核心控制器实现对上、下排传感器的切换控制。整个系统利用上、下排激光管反射回来的激光强弱判断是白色跑道区域还是黑线,然后将其所采集的信号转换为高低电平传送给主控芯片,测速方面采用一个500线增量式光电编码器来实时反馈脉冲,利用单片机的脉冲累加器采集实时速度。最后主控芯片MC9S12XS128综合激光采集的路面信息和编码器采集的速度信息,利用PID 算法实现上排摇头舵机的转角控制、转向舵机的转角控制及电机的调速控制。经实际场地测试,该系统可以很好的适应大、小“S”弯,发卡弯,“十”字交叉,大回环,坡道等不同类型的赛道。