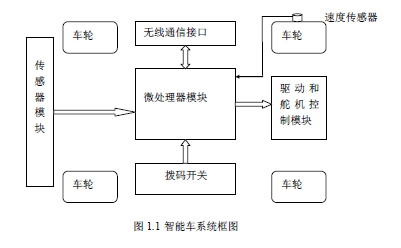
本文介绍了基于Freescale公司MC9S12G128微控制器的自主循线智能车设计方案。根据本次竞赛赛道特点和竞速赛要求,系统采用激光传感器和红外检测传感器联合检测赛道信息,通过分析赛道信息判断出不同路况并采取相应的控制算法。本方案中激光传感器的“V”字形布局顺利解决了起跑线误判问题,在弯道处平滑过弯;中断触发方式检测起跑线方法避免了扫描方式的漏扫情况。在控制算法上速度环采用PID和bang-bang复合控制,提高智能车的加减速性能,最终使小车稳定快速地行驶在复杂赛道上。报告将从机械结构设计、硬件电路设计、传感器布局设计和软件算法设计方面阐述整个系统的开发过程。