本文介绍了安徽大学光电“追风队”在准备参加第七届“飞思卡尔杯”全
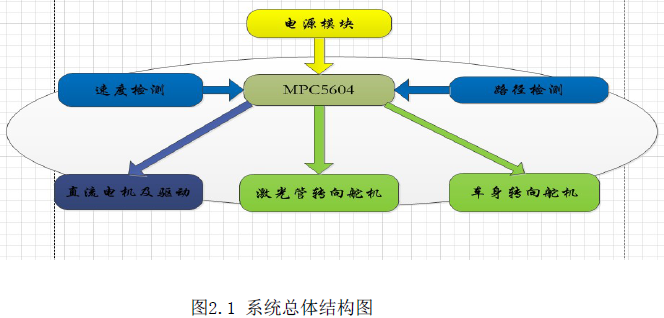
国智能车大赛获得的成果和创新。智能车的车模采用大赛组委会统一提供的B型车模,以飞思卡尔公司的32位单片机MPC5604为核心控制器,选择CodeWarriorIDE 2.10作为软件系统开发环境。系统涉及到对智能车机械部分的调整,硬件电路的设计和控制算法的设计。
本智能车采用激光传感器对赛道黑线进行识别,采用传感器摇头随动方案扩大激光传感器的识别范围;采用BangBang调节根据路况和编码器转速信息控制电机转速,使智能车加减速以及稳定性能达到要求;采用PI调节控制随动舵机转向使传感器快速跟踪黑线和控制转向舵机使车准确快速寻迹;采用低位传感器用于起跑线检测和坡道辅助寻迹。通过不断的赛道实地实验和大量的测试,智能车能够准确快速的完成自动寻迹。