在壁障模块中,可以选择超声波壁障。其优点是反应速度灵敏,距离远,受外界干扰小。但是,在本设计中,题目所要求是距离是20cm,如果利用超声波传感器进行壁障的话,由于空间小声波在小空间不同方向里会进行多次反射,左右前后的传感器之间相互干扰,使控制中心不能明确判断出那个方位遇到了障碍物,从而动作紊乱,不能实现要求。
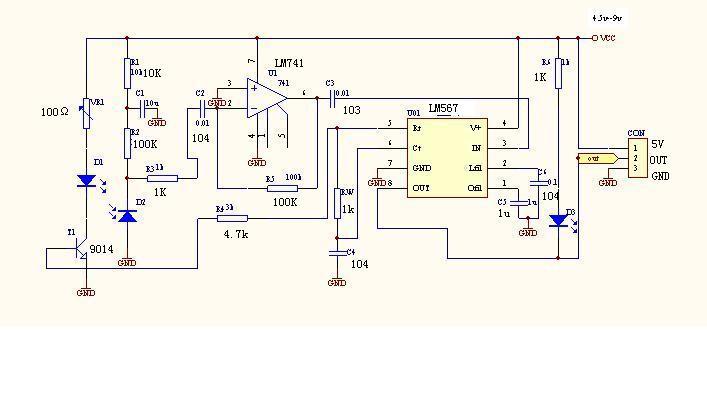
使用红外接收头和发射管配合,利用38k频率解决灵敏度问题。38K调制和发射电路。使用一个定时器的快速PWM模式产生38K调制信号,通过剩余的四个施密特触发器(有2个已经用在光电编码部分)缓冲,推动8050三极管和红外发光管来发射已经调制的红外线。其中2个1N4148接单片机IO脚,控制左右红外发光管轮流发射。后面串接的可见光LED是为了方便用户调试而设置的,让用户知道当前是否在发射红外线。通过调节PWM的占空比,调节红外发光管的亮度,从而实现调节感知障碍物距离的功能。但是实际测试结果不尽人意。灵敏度太高。加衰减电路比较麻烦,调试不易。且价格也贵。
利用红外传感器,其优点是对近距离的障碍物反应速度灵敏,不同方位的传感器之间信号不会相互干扰,造成误动作。缺点是距离近,易受到自然光的干扰。经过两种传感器性能对比与题目要求的综合考虑分析,最终选择红外传感器作为小车的眼睛,进行壁障。