一种轮腿式变结构移动机器人研究.pdf
时间:11-08 11:27
查看:864次
下载:162次
简介:
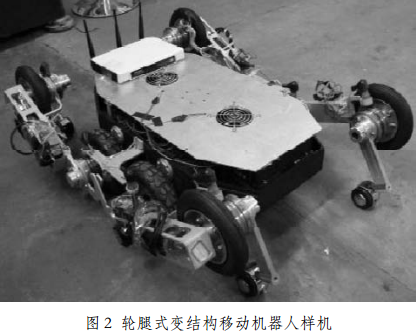
提出一种新型的轮腿式变结构移动机器人。 将四足哺乳动物腿式运动方式与轮式机构相结合,实现了轮式、 腿式、 轮腿结合等多种运动模式。 在对机械本体结构分析的基础上, 阐述了各种运动模式的运动学模型和步态生成方法。开发了主控计算机人机交互系统和基于 ARM 和 DSP的嵌入式运动控制系统, 采用无线以太网建立控制、 反馈通道, 实现了机器人的遥控 / 半自主运动控制。实验表明该机器人具有较强的非结构环境适应能力。