基于曲柄摇杆机构的新型六足爬行机器人的设计.pdf
时间:11-13 10:21
查看:774次
下载:162次
简介:
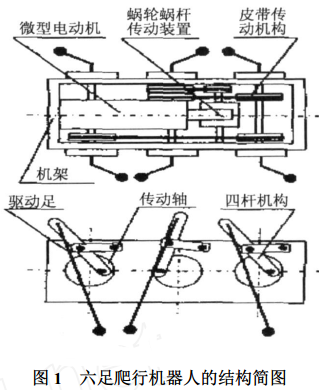
六足爬行机器人在理论上可以实现向前向后稳定行走. 对驱动足采用 了 曲 柄摇杆机构 ,将腿放在四 杆机构的摇杆上 ,实现了 腿前后摇摆行走. 此外 ,由于是通过连杆曲 线图谱选择腿部运动轨迹 ,从连杆曲 线图谱上可以看到 ,整条曲线都是很平滑的 ,因此 ,机器人在行走过程中也会非常稳定 ,而不至于出现冲击载荷 . 对六足机器人的行进机构 、运动设计与分析 、机器人的运动轨迹和六足机器人的控制系统进行了 详细阐述.