智能汽车是未来汽车发展的趋势,它体现了自动控制、人工智能、传感技
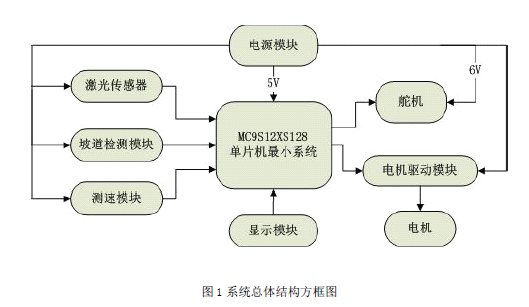
术、机械技术、计算机技术等多个学科领域理论技术的交叉和综合。本文具体介绍了一种基于激光传感器的智能寻迹小车高速方案的设计和实现。智能小车系统以Freescale16 位单片机MC9S12XS128 作为系统控制处理器,采用基于激光传感器的信号采样模块获取赛道黑线信息,通过PID 控制策略和PWM 控制技术对智能小车的转向和速度进行控制。使小车能够自主识别黑色引导线并根据黑色引导线实现快速稳定的寻线行驶。论文分析了智能小车系统的所存在的机械和控制算法上的不足,发现查表控制方式的线性度不足,改为PD 控制后,使控制方式更加线性。并且详细介绍了智能车控制系统的软硬件设计,PID 控制方法的原理。包括传感器模块、驱动电机模块、转向舵机模块等,并对控制算法设计进行了调试改进。最后,介绍了智能车的整体调试、测试。结果表明,对舵机采取分段PD 控制,对速度采取增量式PID 控制要远比采用类似查表得控制算法更为有效,速度更快。平均速度从一开始的2m/s 左右提升到了2.5m/s 左右。