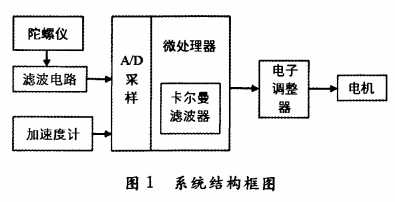
针对在四旋翼飞行器姿态控制中传感器数据存在噪声干扰和测量误差,以致单独使用陀螺仪与加速度计不能得到最优姿态角度的问题,建立陀螺仪和加速度计误差的数学模型,采用卡尔曼滤波方法,实现数据融合,有效地提高了姿态检测系统的检测精度.该方法被成功应用于四旋翼飞行器的飞行姿态角度控制中,验证了其良好的噪声抑制能力,提高了系统对环境变化的适应性.
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
1.HJ-4WD智能小车零基础操作篇1-新手必看(全屏高清)
线性CCD从原理到使用最详细讲解一、线性CCD的原理
11.C51智能小车零基础入门篇1—51单片机最小系统(全屏高清)
第十二节:K60的定时器PIT、LPTMR、SysTick讲解
25.C51智能小车提高篇2—STC12C5A60S2内置看门狗实验(全屏高清)
11.HJ-4WD智能小车入门篇1—51单片机最小系统(全屏高清)
野火攻城掠地之一天攻破K60-17_线性CCD
x