文中介绍了智能小车控制系统的软硬件结构和开发流程。本智能车采用四个电感线圈来检测磁场的寻迹方案,配合舵机,编码器、双电机、电池等组成的驱动控制电路,对电感采集信息进行处理,从而达到识别路径,控制模型车高速稳定地在跑道上行驶的目的。整个系统涉及车模机械结构调整、传感器电路设计及信号处理、控制算法和策略优化等多个方面。
第六节:K60 用户手册的资料查找方法
野火攻城掠地之一天攻破K60-4_重要知识点讲解
变频器功能应用从入门到精通—第6章:变频器PID控制第2节
初级反汇编视频教程08-算法反汇编(啊冲主讲)
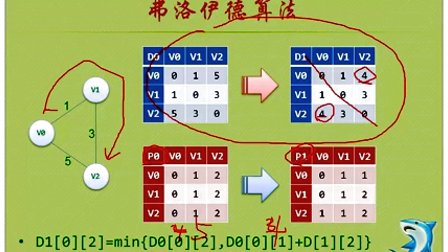
65最短路径(弗洛伊德算法)
68关键路径(代码讲解)
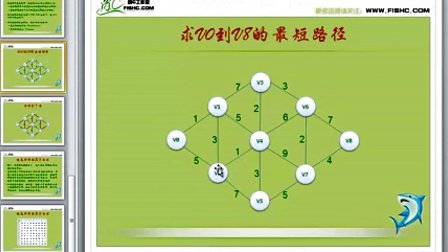
最短路径(迪杰斯特拉算法)
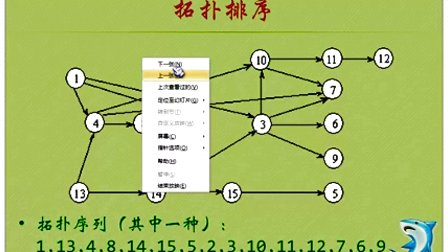
66拓扑排序
x