基于特征地图的移动机器人EKF-SLAM和FastSLAM算法自主导航.pdf
时间:11-19 11:42
查看:2046次
下载:162次
简介:
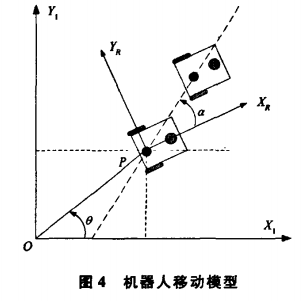
对移动机器人未知环境中自主导航和SLAM(即时定位与构图)问题进行讨论。设计了一种构建2D可视化路标特征地图的方案,该方案结合单目视觉传感器和里程计的鲁棒感知模型,建立包含世界坐标系下三维信息的路标数据库,并获得全局环境下特征地图;提出了一种基于Python平台分析移动机器人自主导航鲁棒性的方法,通过在Python平台下引入扩展模块NumPy、PyLab构建仿真平台,对不同噪声环境下EKF-SLAM:扩展卡尔曼滤波器)和FastSLAM算法的导航过程进行了研究。