光电组竞赛要求是:使用组委会提供的车模自主设计制作一辆能够自主识别路线的智能车,通过检测铺设于专门设计的赛道上的两条黑线获取赛道信息跑完整个赛道;在智能车没有冲出跑道的情况下,按跑完全程用时记录成绩,冲出赛道成绩为零;车模在整个行驶过程中保持两轮直立。
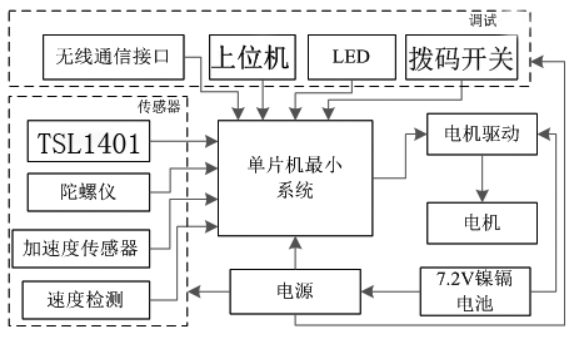
如下光电车结构图所示,按照光电车结构体系,分为传感器、控制器、执行机构和电源等部分。此外辅助模块还包括调试接口和独立模块。
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
1.HJ-4WD智能小车零基础操作篇1-新手必看(全屏高清)
11.C51智能小车零基础入门篇1—51单片机最小系统(全屏高清)
25.C51智能小车提高篇2—STC12C5A60S2内置看门狗实验(全屏高清)
11.HJ-4WD智能小车入门篇1—51单片机最小系统(全屏高清)
智能小车视频教程 18-1、循迹小车
智能小车视频教程 20-1 红外避障实验
37.HJ-4WD智能小车扩展篇7—4WD智能小车超声波避障舵机转动实验(全屏高清)
x