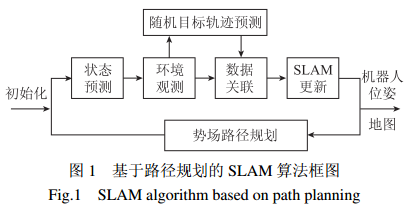
针对动态环境下随机目标同时为特征点和障碍物的情况,提出一种基于路径规划的同步定位与地图构建(SLAM)算法.机器人在同步定位与地图构建的同时,基于势场原理来规划机器人下一步的运动控制规律.利用混合当前统计模型的交互式多模型(IMM)方法预测随机目标的轨迹,采用最近邻数据关联方法将动态随机目标关联到地图中.算法构建的地图由静态特征点和随机目标的轨迹组成.仿真结果表明,提出的算法解决了动态环境中存在的随机目标同时为障碍物时机器人的同步定位与地图构建问题,相关性能指标验证了算法的一致性估计。
高科技机器人,变形金刚,神兽金刚曝光!
山东大学的大狗机器人通过863一期,可载人 可抗侧踢
基于无线网络的机器人安防项目--华清远见
国产技术宅屌丝DIY恐怖机器人
单足自平衡机器人
基于单片机与传感器的机器人头部运动设计与实现
超强的魔方机器人【点击率最高的视频】
基于51单片机的智能清洁机器人
x