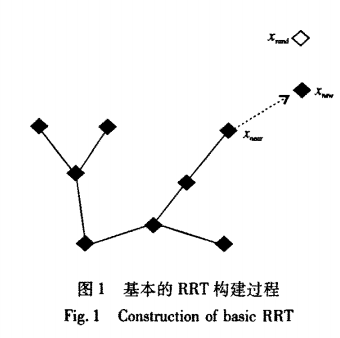
快速扩展随机树(RRT)算法与基于滚动窗口的路径规划相结合,提出一种改进的移动机器人路径规划算法.该方法利用机器人实时测得的局部环境信息,以滚动方式进行在线规划,克服了RRT算法通常只能在已知环境中进行移动机器人路径规划的限制,拓展了应用范围.规划时只考虑窗口环境地图,不必计算障碍物边线的解式,节省了存储空间,算法实时性得以保证.在此基础上,算法引入启发式估价函数,使得随机树易于朝目标点方向生长.同时,运用回归分析生成新节点,避免了可能产生的局部极小,增强了算法搜索未知空问的能力.最后仿真实验验证了该方法的有效性.