第九届飞思卡尔智能车-摄像头组-福州大学-无声
时间:11-01 15:31
查看:743次
下载:163次
简介:
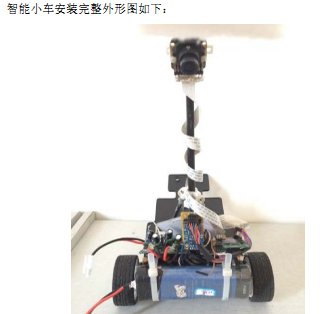
本文设计的智能车系统以MK60DN512ZVLL10微控制器为核心控制单元,通过ov7225数字摄像头检测赛道信息,提取黑色引导线,用于赛道识别;通过光电编码器检测模型车的实时速度,使用PID控制算法调节驱动电机转动。整个系统涉及车模机械结构调整、系统电路设计、图像处理、控制算法和策略优化等多个方面。对比了不同方案的优缺点,通过大量的测试,确定了现有的系统结构和各项控制参数。实验结果表明,该系统设计方案确实可行。